What is LuckyRobots?
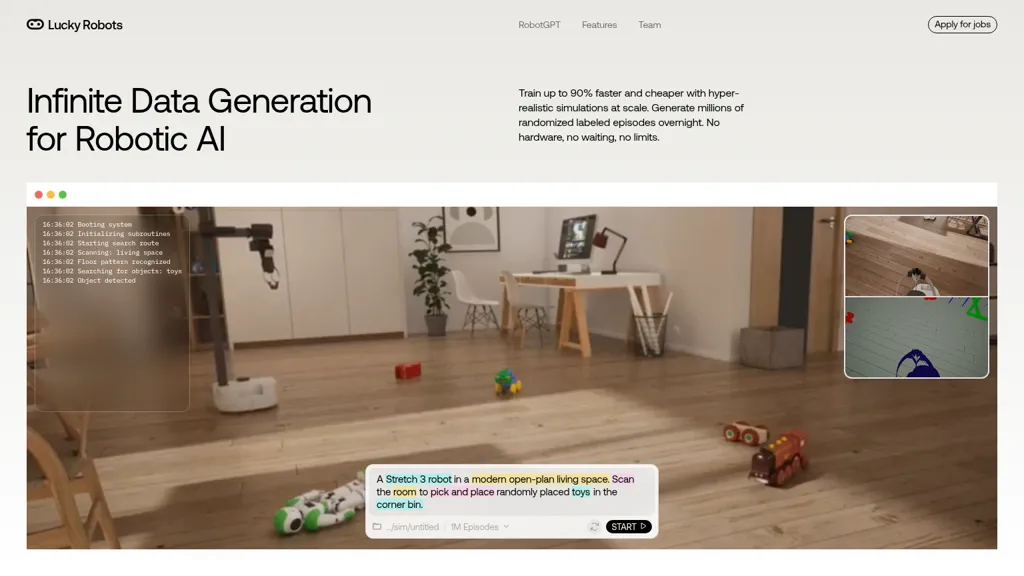
Lucky Robots provides scalable robot simulation and synthetic data generation for robotic AI training.
Generate millions of randomized, labeled training episodes for reinforcement learning, imitation learning, and supervised models without physical hardware.
High-fidelity Unreal Engine physics, sensor models, and material behaviors enable realistic collisions, friction, and sensor feedback for sim-to-real transfer and edge-case testing.
Control scenes with natural language (RobotGPT), scripted scenarios, or standard robot APIs; supports commercial robot platforms and custom robot models.
LuckyHub manages training workflows, model sharing, environment versioning, and deployment pipelines for research teams and development groups.
Use cases include autonomous navigation, manipulation, drone exploration, perception dataset generation, and rapid iteration of control policies.
LuckyRobots user reviews
Would you recommend LuckyRobots?
LuckyRobots's key features
-
High-fidelity Unreal Engine simulations with realistic physics, sensor feedback, and material behavior
-
Massive randomized synthetic data generation of labeled training episodes at scale
-
Natural-language scene and task control for directing robot behavior
-
LuckyHub platform for model and environment sharing, training workflow management, and deployment
-
Support for commercial robots and bring-your-own-robot integration, including custom simulations and private cloud deployments
LuckyRobots use cases
-
Generate massive, labeled synthetic robotics datasets using Unreal Engine–based simulation with realistic physics and sensor models, enabling supervised learning and perception model training at cloud scale while applying domain randomization for robust sim-to-real transfer
-
Accelerate reinforcement learning and imitation learning research by running distributed, curriculum-based experiments with API or natural-language scenario control, integrated workflow management, and automated dataset production for benchmarking policies in complex, physics-based environments
-
Prototype and validate manipulation and navigation controllers by simulating sensor-rich robot interactions, exporting annotated trajectories and evaluation metrics to fine-tune models and reduce real-world testing risk, then iterate rapidly using cloud-scale simulations
Who is it for?
-
Robotics engineers
-
Data scientists
-
Simulation managers
-
Cloud production teams
-
Synthetic data producers