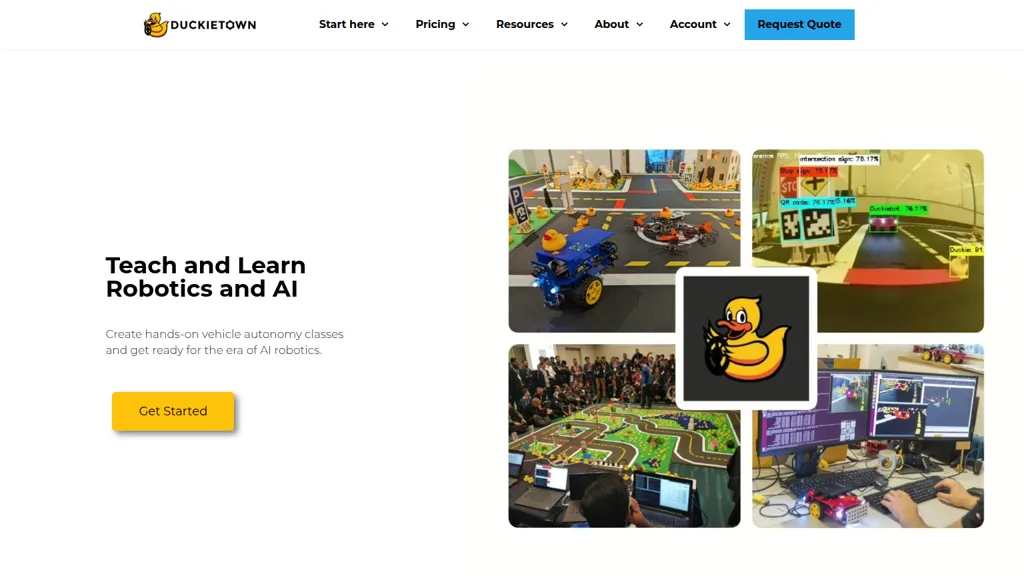
What is Duckietown?
Duckietown, an open-source education and research platform for robotics and autonomous vehicle systems.Provides hands-on hardware (Duckiebots, Duckiedrones) and modular urban testbeds (Duckietowns/Autolabs) for teaching and prototyping vehicle autonomy.
Includes curriculum materials, interactive lectures, lab exercises, ROS- and Python-compatible software, and detailed documentation for instructors and students.Offers simulation tools and workflows for sim-to-real transfer, reproducible experiments, multi-agent systems, and perception and control pipelines.
Supports classroom deployment and research projects with configurable hardware, pre-assembled kits, and integration guides.Designed for educators, learners, and researchers focused on practical robotics education, autonomous driving experiments, and hands-on AI system development.
Duckietown pricing Free
Verify on the official pricing page.
Get started freeDuckietown user reviews
Would you recommend Duckietown?
Duckietown's key features
-
Low-cost Duckiebot mobile-robot hardware built from off-the-shelf parts (pre-assembled and upgrade kits available)
-
Duckiedrone autonomous quadcopter platform that can be built and programmed from scratch
-
Modular Duckietown/Autolab environments (roads, signage, traffic lights, watchtowers) for testing vehicle autonomy and multi-agent scenarios
-
Software stack and tooling compatible with Linux, ROS, and Python, including simulation tools enabling sim-to-sim-to-real transfer
-
Open research and teaching platform with interactive lectures, hands-on labs, rich documentation, and reproducible research workflows
Duckietown use cases
-
Create a hands-on robotics course using Duckietown's preassembled Duckiebots, curriculum and ROS/Python labs so students can learn perception, control and sim-to-real deployment without complex hardware setup
-
Prototype and validate autonomous vehicle perception and control pipelines in Duckietown simulation, then seamlessly transfer and test them on physical Duckiebots and Duckiedrones for real-world sim-to-real research
-
Create reproducible multi-agent autonomy experiments on Duckietown's modular urban testbeds to evaluate coordination algorithms, collect datasets, and collaborate using ROS-compatible tools for publishable results
Who is it for?
-
Software developers
-
Robotics engineers
-
Academic educators
-
Student researchers
-
Hobbyist builders